Fundacja Rozwoju Kardiochirurgii im. prof. Zbigniewa Religi
ul. Wolności 345a, 41-800 Zabrze


Fundacja Rozwoju Kardiochirurgii im. prof. Zbigniewa Religi
ul. Wolności 345a, 41-800 Zabrze
Pracownia ta jest miejscem wstępnej weryfikacji wytworzonych produktów oraz badań sondażowych penetrujących nowe kierunku rozwoju bioinżynierii i kardiochirurgii. Wykonuje badania podstawowe nad sztucznym sercem, testy laboratoryjnie protez zastawek serca, dokonuje pierwszych prób modeli oraz kolejnych ich modyfikacji. Posiada unikatową aparaturę badawczą, w dużej mierze własnej konstrukcji, pozwalającą śledzić procesy przepływu krwi, analizować dynamikę pracy protez oraz nieustannie je doskonalić. W ostatnich latach szczególnie wyspecjalizowała się w zakresie robotyki medycznej oraz symulacji procedur medycznych. Realizuje prace związane z takimi projektami jak np. robotyka medyczna i mechatroniczne narzędzia chirurgiczne
(pierwsze polskie roboty chirurgiczne o nazwie Robin Heart), innowacyjne metody wspomagania chirurgii
(w tym najbardziej zaawansowane w Polsce metody doradcze chirurgii oparte o symulacje komputerowe i modelowanie fizyczne oraz pionierskie metody planowania operacji wykorzystujące technologie wirtualnej przestrzeni), konstrukcja urządzeń i opracowanie metod testowania
sztucznych narządów i biomateriałów (unikatowe techniki i stanowiska badawcze).
Zgodnie z powyższym wprowadzeniem aktywność badawczo-naukową pracowni podzielono na trzy obszary: ROBOT, EXPERT, TEST.
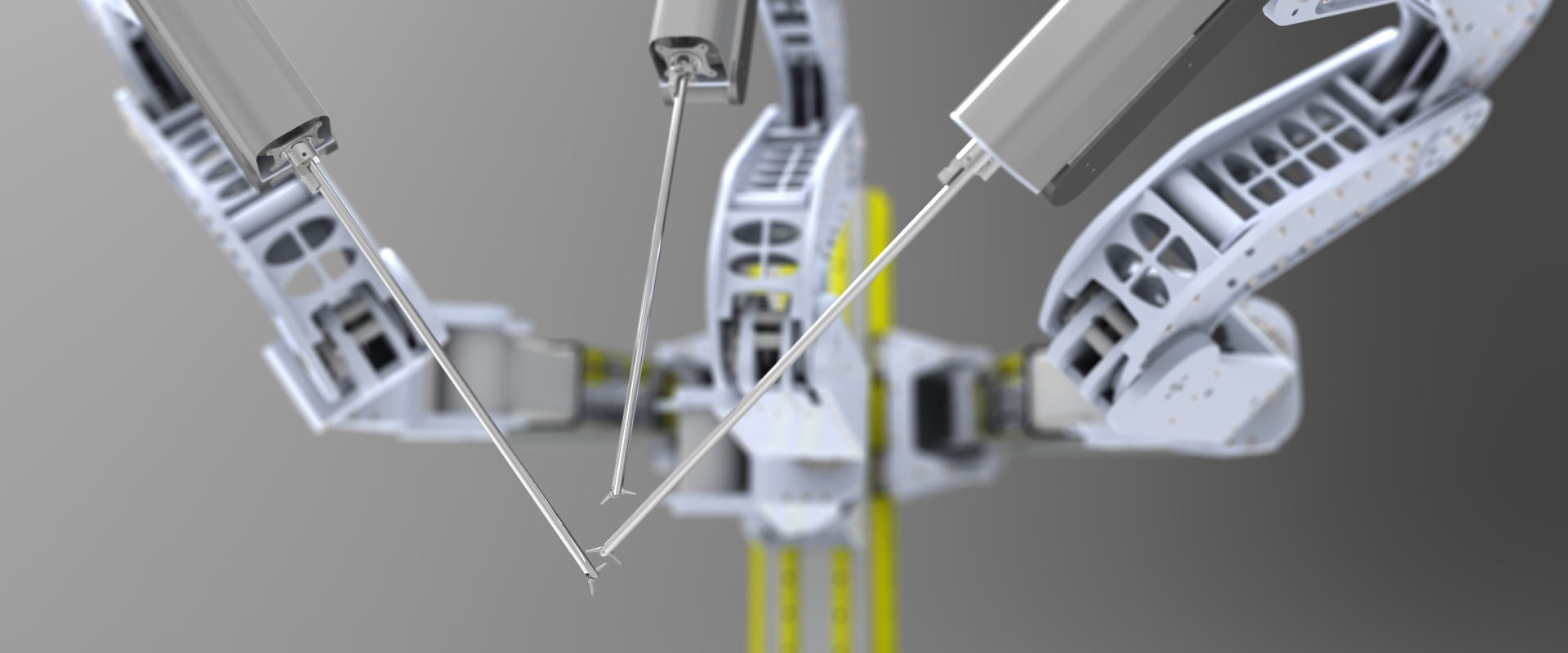
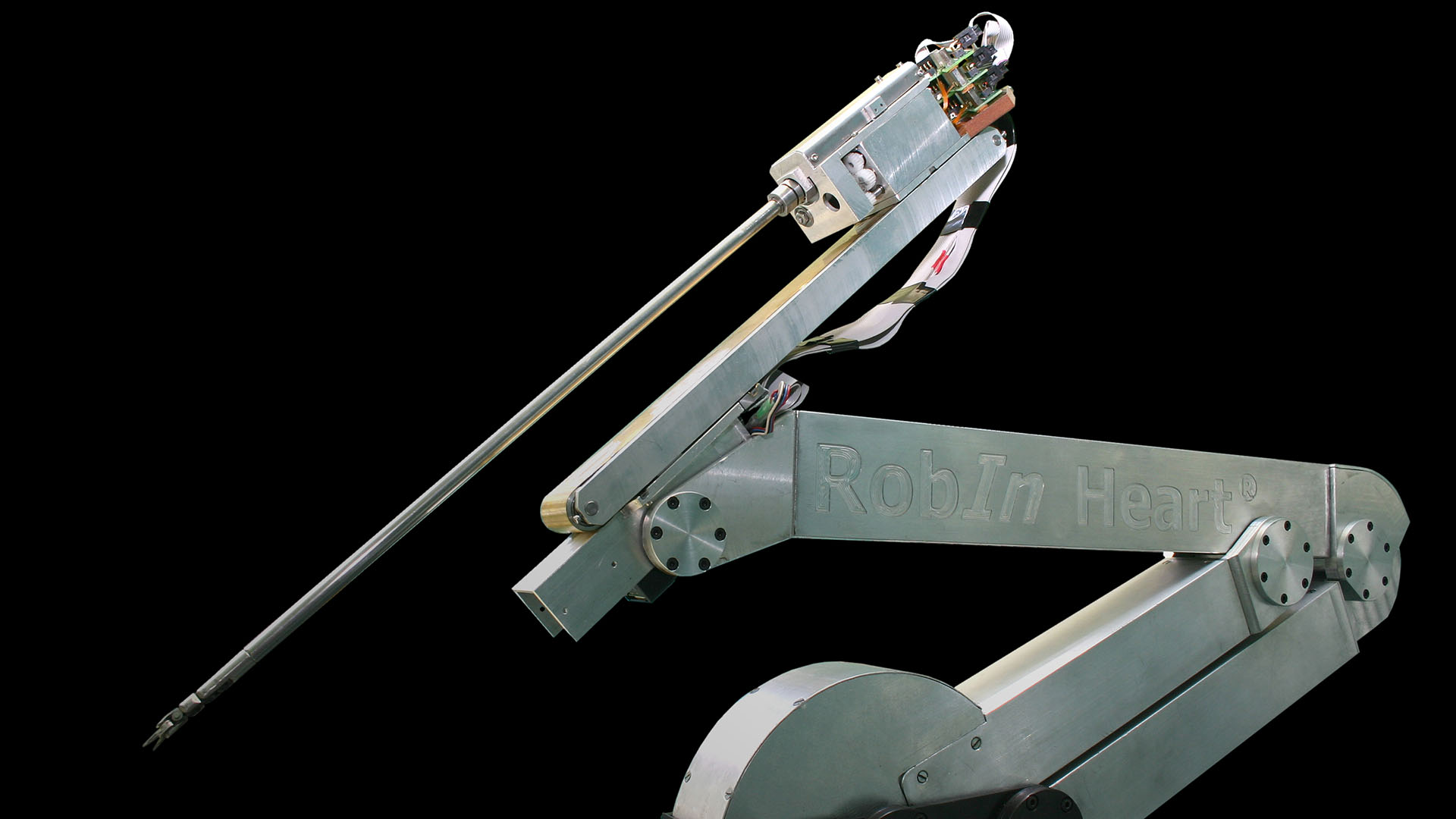
Celem projektu jest opracowanie robota chirurgicznego oraz nowej generacji narzędzi zwiększających precyzję, bezpieczeństwo i zakres stosowania chirurgii małoinwazyjnej. Fundacja zainicjowała budowę robotów chirurgicznych w Polsce, pełniąc rolę pioniera w tym zakresie. Jest również miejscem promocji wiedzy, wymiany poglądów, doświadczeń oraz praktycznej nauki stosowania opracowywanych robotów i narzędzi mechatronicznych. Efektem prac prowadzonych od 2000 roku jest prototypowa rodzina robotów Robin Heart o strukturze segmentowej, umożliwiającej zestawienie sprzętu dla różnych typów operacji. W ramach rodziny polskich robotów Robin Heart powstały trzy modele: Robin Heart 0, Robin Heart 1
(z niezależną podstawą oraz sterowaniem za pomocą komputera przemysłowego) oray Robin Heart 2 (mocowany do stołu operacyjnego, posiada dwa ramiona, na których można zamontować różne narzędzia chirurgiczne lub tor wizyjny z kamerą endoskopową). Obecnie prowadzone są testy, prace nad dopracowaniem ich technologii i optymalizacją tak, by z prototypów powstała rodzina produktów do stosowania klinicznego. W latach 2007-2008 powstał robot Robin Heart Vision - służący do sterowania położeniem endoskopowego toru wizyjnego. Jako pierwszy ma on trafić na sale operacyjne i utorować drogę do kliniki całej rodzinie opracowywanych robotów. Sterowanie robotem odbywa się w ergonomicznej konsoli o nazwie Robin Heart Shell, imitującej pracę chirurga „wewnątrz organizmu” pacjenta. W ramach projektu - Robin Heart PortVisionAble, powstały produkty odpowiadające na zapotrzebowanie świata medycznego na lekkie, przenośne (walizkowe), zrobotyzowane stanowisko sterowania położeniem kamery endoskopowej.
Trwają również prace nad opracowaniem i wdrożeniem w pełni oryginalnych, mechatronicznych narzędzi chirurgicznych specjalnych Robin Heart Uni System (takich np. jak: igłotrzymacz, nożyce-skalpel, nitownica, zszywacz, narzędzia do wszczepiania kaniul i zszywania tkanek), które można umocować na ramieniu robota (sterowane z konsoli robota) lub w specjalnym uchwycie (orientacja i sterowanie manualne). Zabiegi wykonywane za pomocą takich narzędzi, wprowadzonych przez niewielkie otwory w ciele pacjenta, będą mniej urazowe i inwazyjne, skracając czas samej operacji oraz rekonwalescencji.
W styczniu 2009 roku roboty i mechatroniczne narzędzia chirurgiczne zostały przetestowane w pierwszych, eksperymentalnych badaniach na zwierzętach, w Centrum Medycyny Doświadczalnej Śląskiego Uniwersytetu Medycznego w Katowicach. W operacji usuwania pęcherzyka żółciowego oraz operacji naprawczej zastawek serca wzięli udział znakomici kardiochirurdzy: Romuald Cichoń, Joanna Śliwka, Grzegorz Religa, Michał Zembala. Podczas operacji na zwierzętach bez zarzutu poradził sobie Robin Heart Vision. Wykonując zadania związane ze sterowaniem położenia toru endoskopowego, spełnił oczekiwania twórców i użytkowników. Zebrane opinie i uwagi zostały wykorzystane do udoskonalenia narzędzi oraz pozostałych elementów robota chirurgicznego. Na ich podstawie, w 2009 r., podjęto decyzję o budowie zupełnie nowej wersji robota - Robin Heart mc2, który odpowiadałby na potrzeby precyzyjnego działania zarówno w klasycznych operacjach endoskopowych, jak i w małym obszarze (np. pobieranie naczyń do tzw. by-passów) oraz operacji chirurgicznych przez otwory naturalne chorego.
Z myślą o przyszłościowej komercjalizacji zrobotyzowanych urządzeń opracowanych w Fundacji, w 2005 r., powołany został, w ramach funduszy unijnych Zakład Robin Heart Service.




Celem projektu jest opracowanie nowych metod wspomagających proces planowania, konsultacji, przygotowania operacji oraz treningu chirurgów. W latach 1997 – 2000 Pracownia Biocybernetyki poprowadziła pierwszy w Polsce, nowatorski i unikatowy projekt badawczy dotyczący symulacji procedur chirurgicznych. Pozwala on, przy użyciu metod modelowania fizycznego, matematycznego oraz symulacji komputerowych, zoptymalizować efekt operacji chirurgicznej, zwłaszcza w układzie sercowo-naczyniowym. Procedura symulacji może znaleźć zastosowanie zwłaszcza przy operacjach wrodzonych wad serca u dzieci. Może być wykorzystywana zarówno w postaci ogólnej, jak i w odniesieniu do konkretnego pacjenta. W ramach programu symulacji procedur kardiochirurgicznych wykonywane są badania modelowe m.in. operacji Blalocka - Tausinga, operacji Fontany, operacji Batisty oraz operacji pomostowania naczyń wieńcowych (by-pass), jak również tworzony jest bank danych dotyczący wrodzonych wad serca.
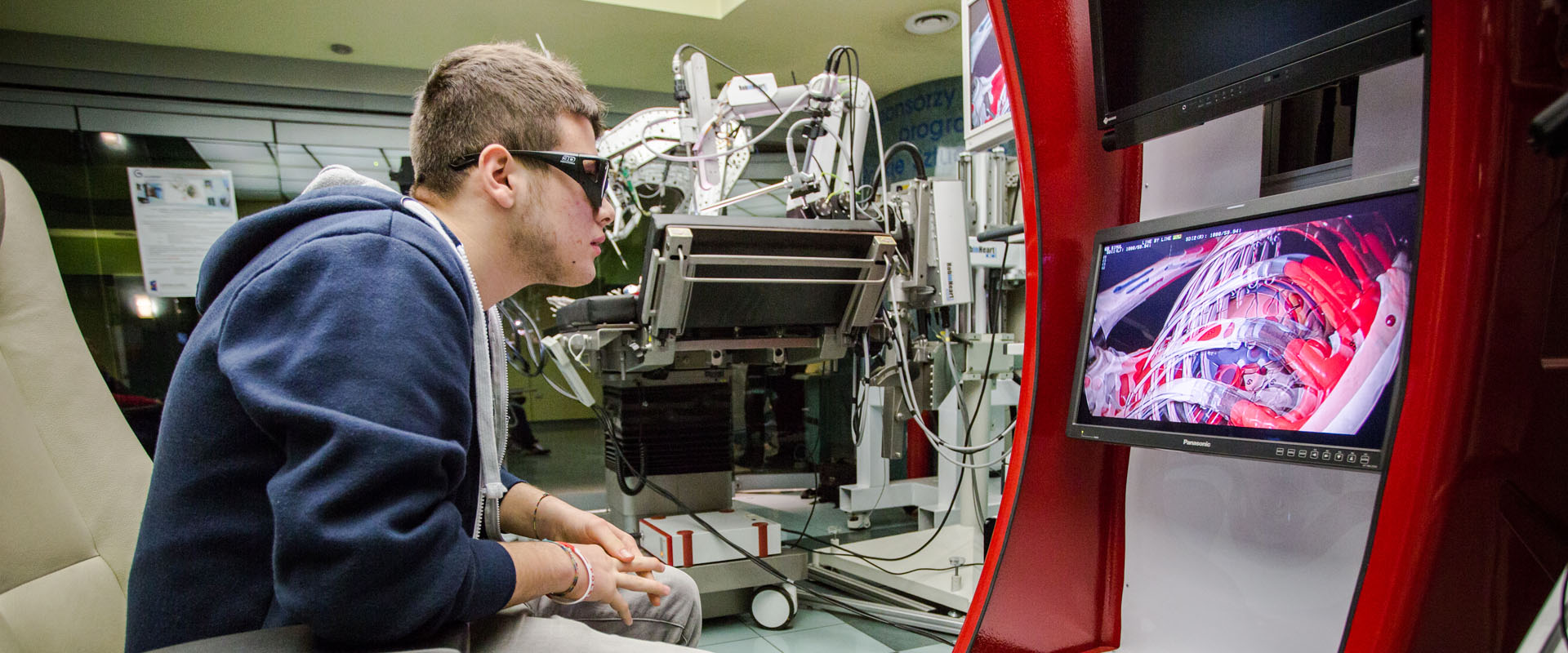
Opracowywane są również specjalizowane programy ekspertowe dla chirurgów, np. związane ze stosowaniem sztucznych narządów, czy nowych narzędzi. Do celów dydaktycznych rozwijana jest zrobotyzowana sala operacyjna, w której w zintegrowany sposób można sterować wszystkimi jej elementami. W celach dydaktycznych i naukowych stosowane są najnowsze osiągnięcia z zakresu interaktywnej wirtualnej przestrzeni, która umożliwi testowanie realnego robota na wirtualnym pacjencie dla wybranego typu operacji chirurgicznej. Wirtualna sala operacyjna znajduje zastosowanie jako stanowisko treningowe przyszłych chirurgów mogących zapoznać się z zachowaniem i sposobem sterowania robotem Robin Heart, jako narzędzie do planowania procedur operacyjnych, z możliwym instruktażem „krok po kroku” danego toku postępowania oraz może być użyta w w programie doradczym, gdzie komendą głosową w trakcie zabiegu chirurgicznego zastanie przywołana procedura przećwiczona wcześniej na wirtualnym modelu. Technologia wirtualnej rzeczywistości jest wykorzystywana również w procesie projektowania nowych narzędzi chirurgicznych – już w trakcie projektowania możemy ocenić ich przydatność w określonej przestrzeni operacyjnej na modelu pacjenta. Obok wykorzystywania możliwości wirtualnej przestrzeni, rozwijane są też umiejętności w zakresie e-edukacji, na podstawie doświadczeń w telekonferencjach oraz zajęć dydaktycznych z wykorzystaniem technologii e-lerningowych.
W pracowni Biocybernetyki trwają prace nad trenażerami do wideochirurgii, stanowiskami treningowymi, symulatorami do nauki praktycznych umiejętności manualnych oraz do symulacji medycznych procedur i nowoczesnych technik chirurgii laparoskopowej. Trenażery mają na celu zapewnienie nabycia umiejętności istotnych i niezbędnych do wykonywania różnych operacji i pozwalają na rozwój koordynacji wzrokowo-ruchowej podczas typowych podstawowych manualnych czynności takich jak szycie, cięcie, odpowiednie wprowadzenie i ułożenie narzędzi, uchwycenie tkanki, igły itp., obsługę narzędzi laparoskopowych jak i umiejętności praktyczne i decyzyjne z zakresu nowoczesnych technik operacyjnych. Symulatory wpływają na poprawę bezpieczeństwa pierwszych wykonywanych przez chirurga operacji oraz dają możliwość kontroli nabytych podczas szkolenia umiejętności przez nadzorującego chirurga oraz pozwalają na ilościową ocenę np. ekonomiki i celowości ruchów, czasu czy liczby popełnionych błędów.
Stanowiska docelowo znajdują zastosowanie w procesie szkolenia przyszłych lekarzy, chirurgów, podczas warsztatów chirurgicznych BioMedTech Silesia, co pozwala na weryfikację użytkową konstrukcji symulatorów, ich funkcjonalności oraz algorytmu nauczania. Opracowana w wyniku projektu dokumentacja technologiczna, konstrukcja i sterowanie będą mogły być wykorzystane do szybkiego opracowania technologii produkcji seryjnej.
Pracownia Biocybernetyki od 2006 roku organizuje corocznie międzynarodową konferencję „Roboty Medyczne” oraz konferencję „BioMedTech Silesia” (http://www.biomedtech.eu/) połączoną z warsztatami chirurgicznymi. Konferencja „Roboty Medyczne” dedykowana jest naukowcom, projektantom, konstruktorom i użytkownikom zrobotyzowanych urządzeń stosowanych w medycynie. W czasie konferencji przedstawiane są m.in. plany i najnowsze osiągnięcia nie tylko projektu Robin Heart ale również światowe trendy w robotyce medycznej i rehabilitacyjnej. Konferencja „BioMedTech Silesia” przeznaczona jest dla profesjonalistów, uczniów, seniorów i naukowców, którzy zajmują się tematyką bioinżynierii i biotechnologii medycznej oraz technicznymi, biologicznymi i medycznymi aspektami ratowania ludzkiego życia i zdrowia. Uczestnicy warsztatów, pod okiem lekarzy ze Śląskiego Centrum Chorób Serca i zespołu Pracowni Biocybernetyki FRK trenują użycie klasycznego, laparoskopowego i zrobotyzowanego sprzętu operacyjnego na odpowiednio przygotowanych stanowiskach treningowych. Z tej unikatowej szansy polepszenia swoich umiejętności manualnych w chirurgii przy użyciu nowoczesnych i klasycznych narzędzi, na specjalnie przygotowanych stanowiskach treningowych, podczas warsztatów korzysta corocznie ponad 200 osób.

Zespół Pracowni Biocybernetyki wciąż rozwija swój warsztat badawczy i wprowadza nowe projekty. Rezultatem tej pracy są stanowiska badawcze wizualizacji laserowej i pomiarów anemometrycznych przepływu cieczy, modele fizyczne układu krążenia, pełny system testerów zastawek serca, stanowisko badań własności biomechanicznych tkanek, sterowniki pneumatyczne i elektromechaniczne testerów, czy napęd pneumatyczny sztucznego serca. Wszystkie stanowiska badawcze nadzorowane są komputerowo, w oparciu o własne programy systemu sterowania oraz automatycznego monitorowania, archiwizacji i opracowywania danych. Równolegle z badaniami modeli fizycznych wykonywane są symulacje komputerowe przepływu oraz symulacje matematyczne modeli, a także badania in vitro hemolizy i krzepnięcia krwi, co ma szczególne znaczenie w procesie projektowania nowych pomp krwi.
Celem projektu TEST jest nieustanny rozwój zaplecza naukowo-badawczego, poprzez dalszą budowę wyspecjalizowanych stanowisk, konstrukcję urządzeń i opracowanie metod badawczych oraz wykonanie za ich pomocą badań podstawowych, wspomaganie prac projektowych, badawczych, doradczych sztucznych narządów, biomateriałów.
W wyniku rozwoju unikatowych metod badawczych stosowanych w różnych fazach prac projektowych nad protezami serca, biomateriałami i robotami chirurgicznymi, powstały oryginalne urządzenia i stanowiska badawcze oraz doświadczenie lidera tej dziedziny w Polsce, wykorzystywane obecnie do dalszych prac rozwojowych, wyspecjalizowanych badań dla ośrodków medycznych oraz w dydaktyce akademickiej. Celem rozwoju aktywności naukowej w omawianym zakresie jest umocnienie pozycji wyspecjalizowanego partnera prac badawczo-rozwojowych związanych z testowaniem sztucznych narządów i biomateriałów, z badaniami komercyjnymi i rozwojowymi dla medycyny oraz przemysłu medycznego. Jednym z niezbędnych elementów realizacji tematu jest uzyskanie odpowiedniego statusu w europejskich sieciach laboratoriów oraz certyfikacja laboratorium w wybranym zakresie.
Wykonywane badania, opracowywane urządzenia i techniki badań służą zarówno jako element procedury przygotowania nowych protez serca, jak i wspierają ocenę kliniczną ich stosowania. Co roku w celu poprawy sprawności układu krążenia wszczepia się (implantuje) setki tysięcy protez zastawek serca, protez naczyń krwionośnych, tysiące stymulatorów serca i pomp krwi przywracając zdrowie prawie miliona pacjentów. Pojawiające się uszkodzenia i wady materiałowe (biodegradacja) są głównym powodem reoperacji, wymiany protez na nowe i inspiracją do poszukiwań lepszych materiałów, lepszych rozwiązań technologicznych protez. Fundacja prowadzi jedyne w Polsce działania w zakresie opracowania procedur badań, organizacji sieci laboratoriów oraz bazy danych obejmującej wyniki badań w kilku grupach protez układu krążenia stosowanych powszechnie u pacjentów. Według ustalonych procedur wykonywane są kompleksowe badania wybranych pozyskanych protez biologicznych i mechanicznych zastawek serca, homograftów, protez (graftów).
W Pracowni Biocybernetyki realizowanych jest wiele projektów naukowo badawczych finansowanych zarówno ze środków UE jak i Narodowego Centrum Badań i Rozwoju oraz Narodowego Centrum Nauki. Poniżej kilka zrealizowanych projektów:
W przyszłości takie modele 3D staną się standardem leczenia wad serca zarówno tych wrodzonych jak i nabytych oraz umożliwią optymalne przygotowanie strategii operacji, poprawienie jej skuteczności i zmniejszenie do minimum ryzyka wystąpienia powikłań pooperacyjnych.



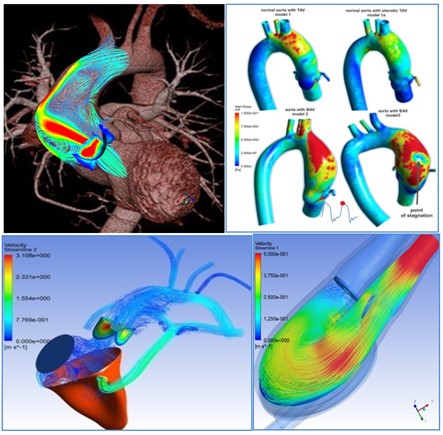
Pracownia Biocybernetyki prowadzi nowatorskie i unikatowe projekty badawcze dotyczące metod wspomagania leczenia wad układu krążenia i symulacji procedur chirurgicznych, które przy użyciu metod modelowania fizycznego, matematycznego oraz symulacji komputerowych, pozwalają zoptymalizować efekt operacji chirurgicznej, zwłaszcza w układzie sercowo-naczyniowym. Współczesna medycyna wymaga od lekarzy sprawnego korzystania z nowych technik chirurgicznych oraz coraz większej ilości informacji diagnostycznych charakteryzujących stan organizmu chorego. Zdobycie kompetencji chirurgicznej jest złożonym, wieloczynnikowym procesem i może trwać latami. Ważne jest, aby zapewnić odpowiednie możliwości edukacyjne do nauki, niezbędną wiedzę, ocenę i umiejętności. Dogłębne zrozumienie anatomii, fizjologii, patologii i zasad chirurgicznych jest konieczne. Wiedza, co robić i ocena kiedy, i jak to zrobić oraz odpowiednie umiejętności są krytycznymi aspektami każdej operacji. Oprócz dokładnego poznania stanu pacjenta przed zabiegiem istotnym jest również wiedza na temat możliwości zastosowania różnych metod leczenia i ich wpływu na stan pacjenta po zabiegu. W przypadku chirurgicznego leczenia wad serca i układu krążenia krwi, chirurg jeszcze przed zabiegiem powinien wiedzieć, który sposób leczenia będzie najlepszy dla konkretnego pacjenta i jak go wykonać.
Nowe metody diagnostyczne takie jak USG, CT, MRI, SPECT czy PET dostarczają bardzo dużo informacji, które należy efektywnie wykorzystać. Są to badania, które umożliwiają otrzymanie dowolnego obrazu struktury układu krążenia a niektóre pozwalają dodatkowo ocenić wskaźniki dynamiczne takie jak przepływ krwi, objętość minutową serca, gradienty ciśnień, rozkład prędkości itp. Dane te mogą być stosowane do stworzenia modelu fizycznego oraz komputerowego dla danego pacjenta i dostarczenia szczegółowych, przewidywanych informacji o zmianach właściwości hemodynamicznych (rozkład ciśnienia, wektory prędkości, naprężenia ścinania, obszary recyrkulacji itp.) w układzie krążenia jakie nastąpią po wykonaniu danego zabiegu.
Procedura symulacji może znaleźć zastosowanie przy operacjach wrodzonych wad serca u dzieci. Może być wykorzystywana zarówno w postaci ogólnej, jak i w odniesieniu do konkretnego pacjenta. W ramach programu symulacji procedur kardiochirurgicznych wykonywane są badania modelowe m.in. operacji Blalocka- Tausinga, operacji Fontany, operacji Batisty oraz operacji pomostowania naczyń wieńcowych (by-pass). Opracowywane są również specjalizowane programy ekspertowe dla chirurgów, np. związane ze stosowaniem sztucznych narządów, czy nowych narzędzi.
W pracowni w ostatnich latach wykonano m.in.:




Akcje: PoznajGwiazde.pl
Fundacja Rozwoju Kardiochirurgii
im. prof. Zbigniewa Religi
ul. Wolności 345a,
41-800 Zabrze